Robotics Manipulation Laboratory (ManLab)

Living beings are able to skillfully manipulate objects and tools of various shapes, sizes, weights, and materials using a wide variety of strategies like grip, thrust, slip, tipping, scrolling and throwing.
Although great scientific advance in last 2 decades, majority of robots manipulate objects only using traditional pick’n’place approach.
More sophisticated ways, including dynamic robotics manipulation, generate challenges in fields of high speed detection and control, but dynamics may be explored to help robot to control objects and tool movements that, otherwise, would be impossible.
Our Lab aims to develop methods that offer a larger manipulating primitive set to robots, increasing its potential application range. Specifically, we are currently devoted in the following applications:
- Aeronautis Industry with automatization of repeated, insalubrious and dangerous process;
- Healthy Care, researching ways to implement robotic aid surgery and robotic rehabilitation.
Laboratory’s main research and interests include the following topics:
- Visuo-tactile-motor coordination and interaction control in environments with loss and establishments of multiple contacts; ;
- Machine learning;
- Embedded systems and real-time requisites applications;
- Modeling, Simulation, Control, Planning and Optimization.







Laboratório de Robótica Móvel (LabRoM)
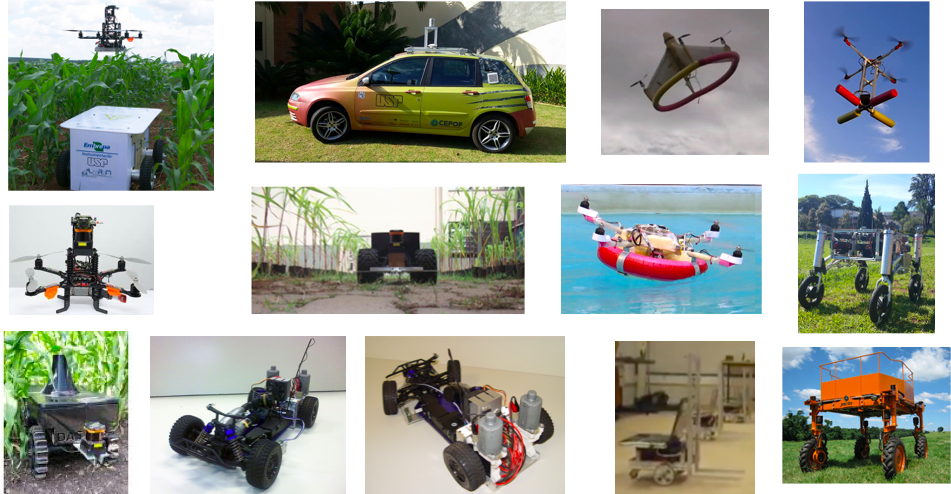
A robótica saiu do ambiente fabril e está a cada dia mais próxima de nós. Manipuladores industriais estão sendo combinados com robôs móveis e suas aplicações estão ficando cada vez mais amplas. Neste contexto, o LabRoM foca suas pesquisas em robôs móveis terrestres e aéreos para ambientes industriais e agroindustriais, para a execução de diferentes tarefas. Desenvolvemos protótipos, hardware, controladores e softwares para navegação, mapeamento, manuseio de cargas, inspeção e percepção de ambientes. Trabalhamos em parceria com empresas, outras universidades e centros de pesquisa no Brasil e no Exterior. Fazemos parte do CePOF – Centro de Pesquisa em Óptica e Fotônica.
Laboratório de Referências de Tempo e Espaço (LRTE)
Metrologia Científica de Tempo e Frequência está entre as principais atividades estratégicas para desenvolvimento sócio-econômico e tecnológico. Desde experimentação científica de alta qualidade, sistemas de navegação confiáveis, transações financeiras seguras e validação de dados de sinais coletados a serem processados, exigem confiabilidade de sincronismo em diversos níveis.
Atualmente temos dois experimentos desenvolvendo padrões em regime de micro-ondas: um chafariz atômico e um relógio compacto baseado em átomos frios. Com o nosso sistema de pente de frequências (Menlo), também conseguimos conectar os domínios de micro-ondas e óptico. Desse modo, os experimentos de Sr neutro, íons de Sr e o laser ultra-estável em 1550nm são todos interconectados e ligados ao domínio de RF.
O desenvolvimento de nossos experimentos também possui uma estrutura de apoio para comparação e disseminação das referências de frequência. Temos um sistema para prover uma escala de tempo local e fazer a ligação entre os padrões locais e o Tempo Universal Coordenado (UTC), através de sinal de GPS. Receptores de satélite são comparados com padrões comerciais e experimentais. A escala de tempo local é utilizada via ligação direta nos distribuidores do laboratório ou através de um servidor NTP experimental.
Nosso laboratório está também sendo capacitado a contribuir com a formação do UTC(BIPM), através da recepção de sinal de GPS e comparação com os relógios locais.



Laboratório de Controle de Robótica Avançada (ARCLab)
O grande desenvolvimento tecnológico das últimas décadas vem criando várias oportunidades para robótica e, com isso, os requisitos de projeto e especificações de desempenho estão cada vez mais exigentes. Por isso, o ARCLab tem como objetivo desenvolver algoritmos de controle para sistemas robóticos avançados que interagem constantemente com o ambiente e/ou pessoas, como robôs com pernas e braços e robôs exoesqueleto. O controle de impedância mecânica, controladores não lineares, controle ótimo e adaptativo são algumas das áreas de atuação do laboratório. O ARCLab tem grande interesse também em sistemas de atuação hidráulico, visto as muitas propriedades que os fazem adequados para robôs dinâmicos, como grande força, velocidade, robustez mecânica e densidade de potência. Aplicações contempladas pela nossa pesquisa incluem robôs para resgate e inspeção, robôs florestais e agrícolas e reabilitação robótica.



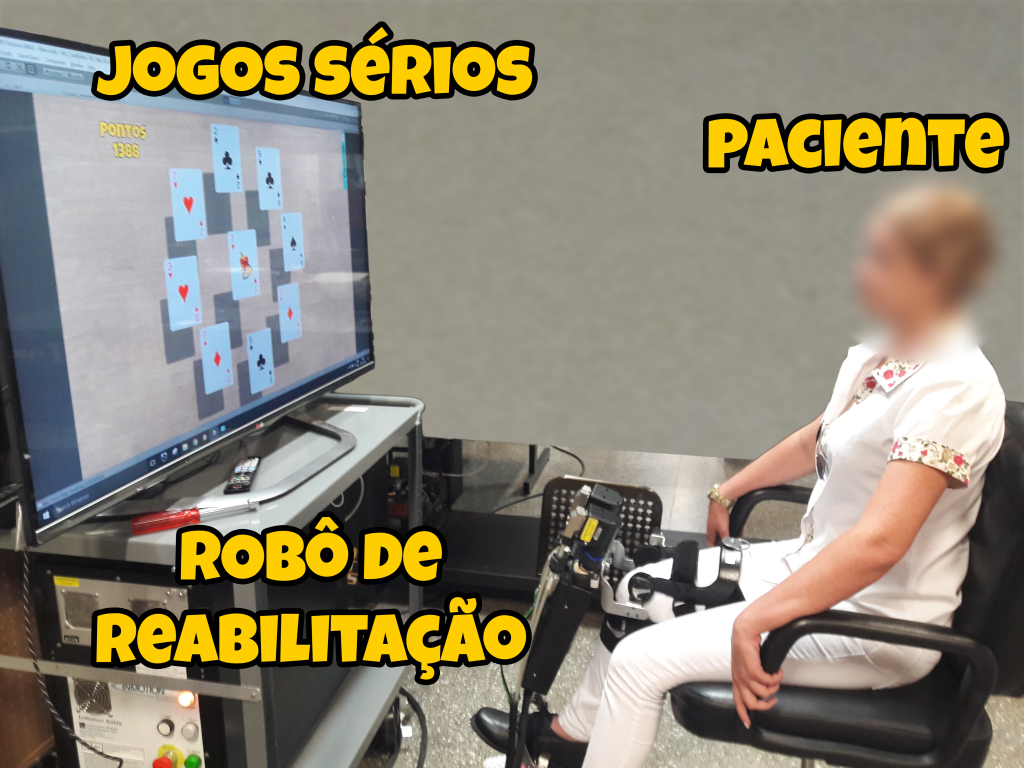
O objetivo do Laboratório de Reabilitação Robótica é o desenvolvimeto de novos dispositivos robóticos para avaliação e reabilitação de pessoas com deficiência motora, especialmente pacientes com AVC e indivíduos com lesão medular incompleta. Investigamos também novas estratégias de controle para sistemas robóticos interativos, com o objetivo de garantir uma operação segura do sistema paciente/robô e melhorar a recuperação motora. Para atingir estes objetivos, dados de dispositivos vestíveis (acelerômetros, giroscópios) e dados biológicos obtidos diretamente dos indivíduos, por exemplo, sinais eletromiográficas (EMG), são utilizados. Esses sinais podem ser processados para identificar a intenção de movimento (EEG), ativação muscular e início de movimento (EMG) e fases de marcha e condições posturais (IMU). Além disso, jogos de computador e abordagens baseadas em realidade virtual são usados para motivar os pacientes durante a sessão de terapia.



Repositórios de Código
Repositórios Git com o software desenvolvido nos laboratórios distribuído sob licenças abertas (GPL, LGPL, MIT, etc) podem ser encontrados na página da organização no GitHub: